

שליטה במערכות רובוטיות – באמצעות בקר מכונה או בקר רובוט?
מטרתו של מאמר זה להציג את היתרונות של כל שיטה ולאפשר ללקוח להחליט מהי שיטת הבקרה המועדפת במקרה שלו. וכן מתי נעדיף רובוט קיים ומתי נעדיף לפתח מתקן ייעודי.
כחברה ותיקה המספקת פתרונות אוטומציה ובקרה, בדרך קבע פונים אלינו לקוחות במטרה לייעל תהליכים מסויימים. לעיתים זה להפוך תהליך ידני לתהליך אוטומטי, לעיתים זה להגדיל תפוקה או לשפר תהליך שכבר מתבצע באופן אוטומטי, ולעיתים זה לפתח מערכת חדשה עבור תהליך שלא מתבצע כרגע.
בבואנו להציע פתרון, פעמים רבות אנחנו עומדים בפני התלבטות איזה פתרון להציע. האם לקחת זרוע רובוטית קיימת מהמדף או לתכנן מתקן ייעודי? בשנים האחרונות, בעקבות ההתפתחות והגמישות הרבה שנוספה לבקרי ההינע של YASKAWA, גם אם בחרנו ברובוט מהמדף, עולה בשלב זה שאלה נוספת - האם להשתמש בבקר הרובוט הייעודי או לחילופין האם להשתמש בבקר מכונה שינהל גם את הרובוט בנוסף לצירים ולפעולות האחרות שהוא מנהל.
לכל שיטה יש כמובן את היתרונות שלה. מטרתו של מאמר זה להציג את היתרונות של כל שיטה ולאפשר ללקוח להחליט מהי שיטת הבקרה המועדפת במקרה שלו. וכן מתי נעדיף רובוט קיים ומתי נעדיף לפתח מתקן ייעודי.
הפעלת רובוט דרך בקר הרובוט
בקר הרובוט תוכנן מנקודת מבטו של מפעיל המכונה, באופן שהשימוש בו יהיה פשוט והמהיר על ידי מפעיל מכונה שלא צריך הכשרה ייעודית ארוכה או השכלה הנדסית רלוונטית. מסיבה זו באופן מסורתי, השימוש הנפוץ ביותר ברובוטים תעשייתיים הוא דרך בקר הרובוט.
שיטת ההפעלה היא להביא את הרובוט לנקודות הרצויות בזו אחר זו וללמד את הרובוט מהי כל נקודה, ובאיזה מסלול הוא מגיע ממנה לנקודה הבאה. ניתן כמובן גם להכניס תנאים לביצוע והפעלת אביזרים באמצעות כניסות ויציאות דיגיטליות. היחס למערכת הצירים הוא וקטורי. אין משמעות רבה למיקומו או זוויתו של כל מנוע, אלא לקורדינטות X,Y,Z של קצה הזרוע.
בנוסף, יכולים בקרי הרובוט לשלוט על עוד מספר צירים חיצוניים שיהיו מסונכרנים גם הם עם פעולות הזרוע הרובוטית, כגון צירי מסוע או שולחנות מסתובבים.
עם זאת, בקר הרובוט תוכנן כמערכת סגורה לשימושים מסוימים. האפשרות לשנות נתונים בציר מסוים של הרובוט, או לסנכרן צירים חיצוניים שונים (שלא מובנים מראש ברובוט) היא מוגבלת מאוד.
הפעלת רובוט דרך בקר המכונה
בקרי ההינע של YASKAWA נועדו לשלוט על מספר רב של מנועי סרוו ולסנכרן ביניהם במגוון רחב מאוד של פרופילי תנועה ולוגיקות הפעלה. הבקר הוא "המוח" של המכונה ולכן בנוסף לבקרת המנועים המגוונת הוא מנהל גם את מערך הכניסות והיציאות למכונה, קריאת ותקשורת עם סנסורים שונים, תקשורת עם ממשק המשתמש של המכונה ועוד. לכן הכתיבה לבקר היא באמצעות סביבת פיתוח שתוכננה לעבודה מנקודת מבטו של מפתח המכונה.
מכיוון שכך, ההפעלה של רובוט מבקר המכונה מאפשרת, תיאורטית, מגוון תנועות כמעט בלתי מוגבל – אולם הדבר מצריך בדרך כלל הרבה יותר תכנות, הרבה חישובים מתמטיים מורכבים ומתוך כך גם מקום לסיבוך ולטעויות. כמו כן, הדבר מצריך כתיבת ממשק משתמש ייעודי לאפליקציה.
בכדי לסבר את האוזן, אנחנו אוהבים להשוות זאת לפליימוביל וללגו מעולם משחקי הילדים. בפליימוביל אתה מקבל סט חלקים מורכבים כמעט לחלוטין. יש לך דרך אחת להרכיב אותם, ועיקר הזמן המשחק מושקע ב"עלילה". לעומת זאת בלגו יש אינספור דרכים להרכיב את לבנות הבסיס, אך הבנייה אורכת זמן ודורשת מיומנות. כך שזמן רב צריך להיות מושקע בבנייה.
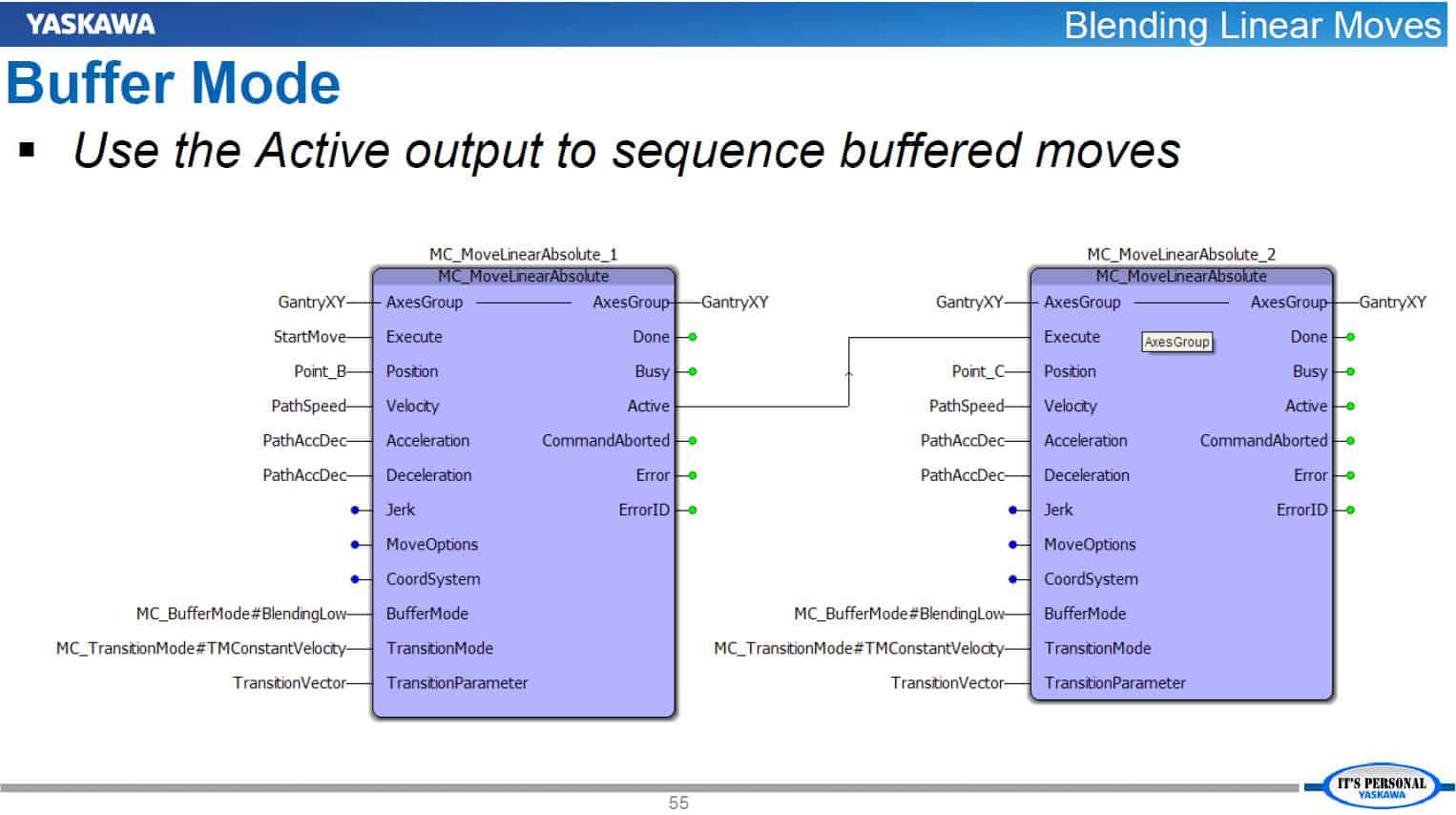
דוגמא לדיאגרמת בלוקים למימוש תנועות רובוטיות מתוך Yaskawa Toolbox
הדור החדש של בקרי המכונה
לאחר האבחנה שערכנו בין בקרי הרובוט לבקרי המכונה הנפוצים, חשוב לציין את פריצת הדרך בבקרי המכונה החדשים של YASKAWA מסדרה MP3000iec. בסדרה החדשה, אנחנו יכולים להגדיר קבוצת מנועים (Group) לפי מכניקת רובוט ידועה וכבר לקבל מערכת צירים מוכנה עבור אותה מכניקה. מכניקות לדוגמא: רובוטי דלתא, H-bot, T-bot, קרטזי XYZ, Gantry ועוד. בנוסף, ניתן לקבל ללא תוספת תשלום ספריות מוכנות למגוון תנועות מסונכרנות של מערכת הצירים. קיימת לדוגמא ספרייה מוכנה להפעלת מדפסת תלת-מימד.
המצב הזה מאפשר שילוב רובוטים במכונה קיימת מבקר אחד לחוד, ועם זמן תכנות ופשטות הפעלה שמקלים על מפתח המכונה וחוסכים לו זמן רב.
אז איך נבחר ובאיזה בקר?
לבקר הרובוט המסורתי יש יתרון בולט כאשר אנחנו רוצים להשתמש ברוב דרגות החופש של הזרוע הרובוטית. יש לו יתרון של הגדרה פשוטה ומהירה על ידי המשתמש הסופי, קרי, מפעיל המכונה, כאשר הרובוט עובד בסביבה עצמאית וללא תלות רבה ברכיבים וצירים נוספים. בסופו של דבר, מדובר בחבילה סגורה "מהמדף" ובדוקה היטב של רובוט עם בקר יעודי ועם ממשק משתמש מתאים.
במקרים שבהם מספר רובוטים עובדים במקביל ו/או קיימת תלות גדולה בצירים ורכיבים נוספים במכונה- אנחנו צריכים בכל מקרה "בקר מנהל" מעל בקרי הרובוטים. אותו בקר מנהל יכול ומתאים להיות בקר מסדרה MP3000, ואז נבחן אם הוא יכול להחליף את בקרי הרובוטים, כולם או חלקם. כאן נצטרך לעשות בדיקה מעמיקה יותר של סוג הרובוטים ושל מורכבות התנועות. לעיתים יכול להיות כאן Trade-off בין עלות בקר נוסף לבין עלות כתיבת הקוד.
כאשר מדובר מערכת עם 2-3 צירים בלבד (2 צירי Gantry ייחשבו כציר אחד לעניין הזה) ו/או כאשר מדובר במהלך (Reach) גדול אך בעבודה עם משקל נשיאה (Payload) נמוך יחסית – ייתכן שנעדיף לתכנן רובוט בעצמנו. זאת מכיוון שבמקרים האלו יידרש מאיתנו רובוט מדף שהוא Overkill עבור האפליקציה והלקוח נדרש לשלם מחיר גבוה עבור תכונות שהוא לא צריך (דרגות חופש / מהלך / משקל). במקרים האלו נותן לנו בקר המכונה מגוון אפשרויות של מכניקות מוכנות שאנו צריכים לממש אחת מהן וכבר קיימת לנו, מבחינה בקרתית, מערכת צירים מוכנה וסט פונקציות מותאמות.

בקר מדגם MP3300-RBT

מערכות צירים מוכנות מתוך מסך ההגדרות בסביבת הפיתוח Yaskawa MotionWorks

מסך הגדרות למערכת צירים Gantry

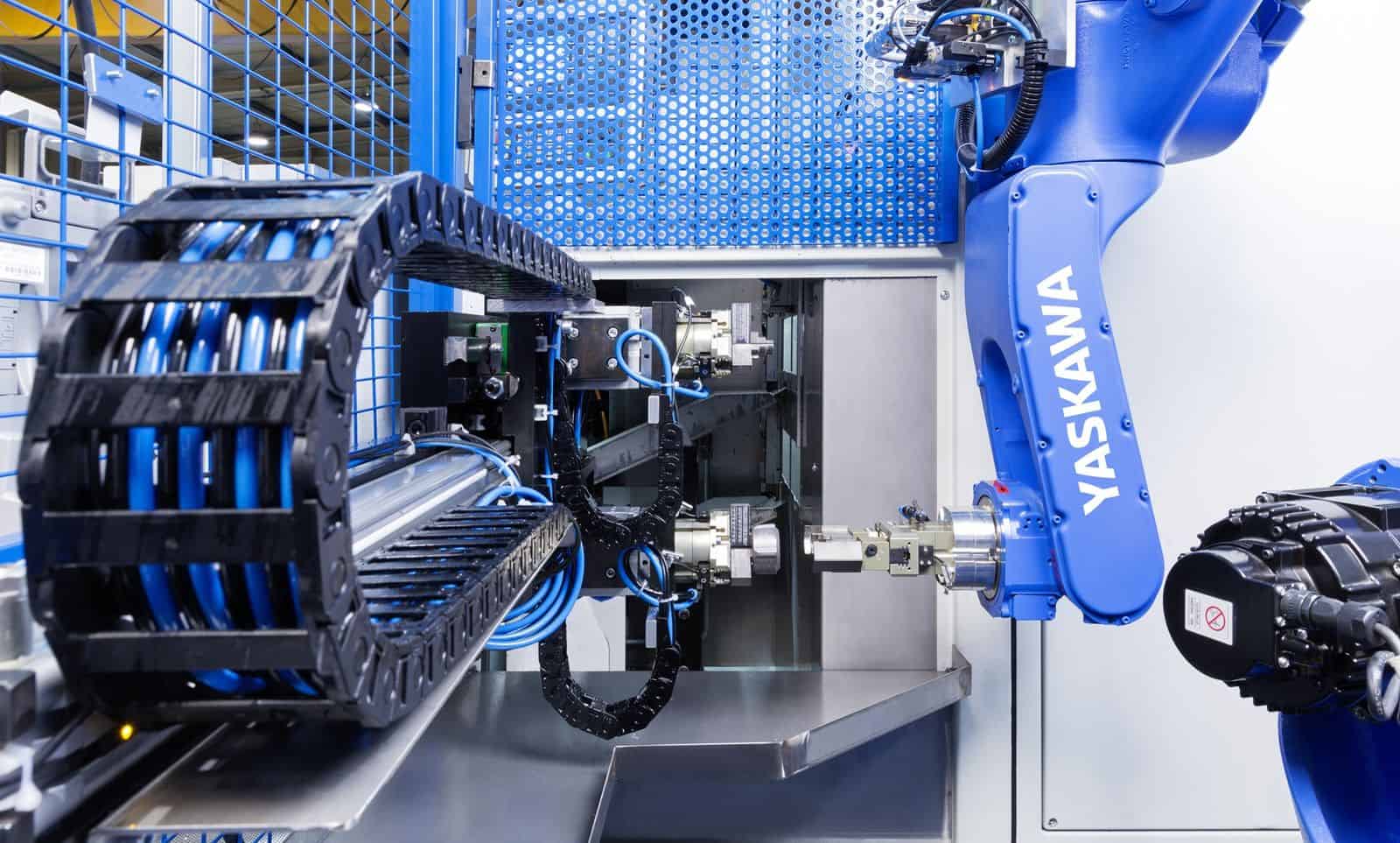
רובוטי ריתוך Yaskawa בתהליך ייצור מורכב
סיכום
שרטטנו במאמר זה על קצה המזלג את האבחנות והיתרונות המתאימים כל בקר. אך זה ממש על קצה המזלג. חברת YASKAWA היא מובילה עולמית הן בתחום הרובוטים התעשייתיים (תחת המותג MOTOMAN) והן בתחום מנועי הסרוו ובקרת הינע מדוייקת. חברת יאסקווה מייצרת כיום כ-3000 מנועי סרוו ביום (!) ומעל מליון מנועים בשנה. ברחבי העולם עובדים למעלה מ- 300,000 רובוטים תעשייתיים של YASKAWA ועוד למעלה מ 20,000 מיוצרים כל שנה. כאן בישראל, אנחנו עובדים בשיתוף פעולה הדוק - מהנדסי מחלקת הרובוטים לצד מהנדסי הסרוו וההינע. ביצענו אנחנו ולקוחותינו גם לא מעט פתרונות משולבים. לכן, כשאתם מתלבטים לאיזה כיוון ללכת בפרויקט הבא, נשמח למצוא ביחד איתכם את הפתרון האיכותי והמשתלם ביותר. הצלחתכם היא הצלחתנו.